Hi All!
I am learning Pyro and trying to implement tutorial Edward example in Pyro
My code is below. Could someone help me to define model and guide correctly? I am not getting an error, but the estimation is incorrect, and I am sure my guide/model function is wrong. Thank you!!!
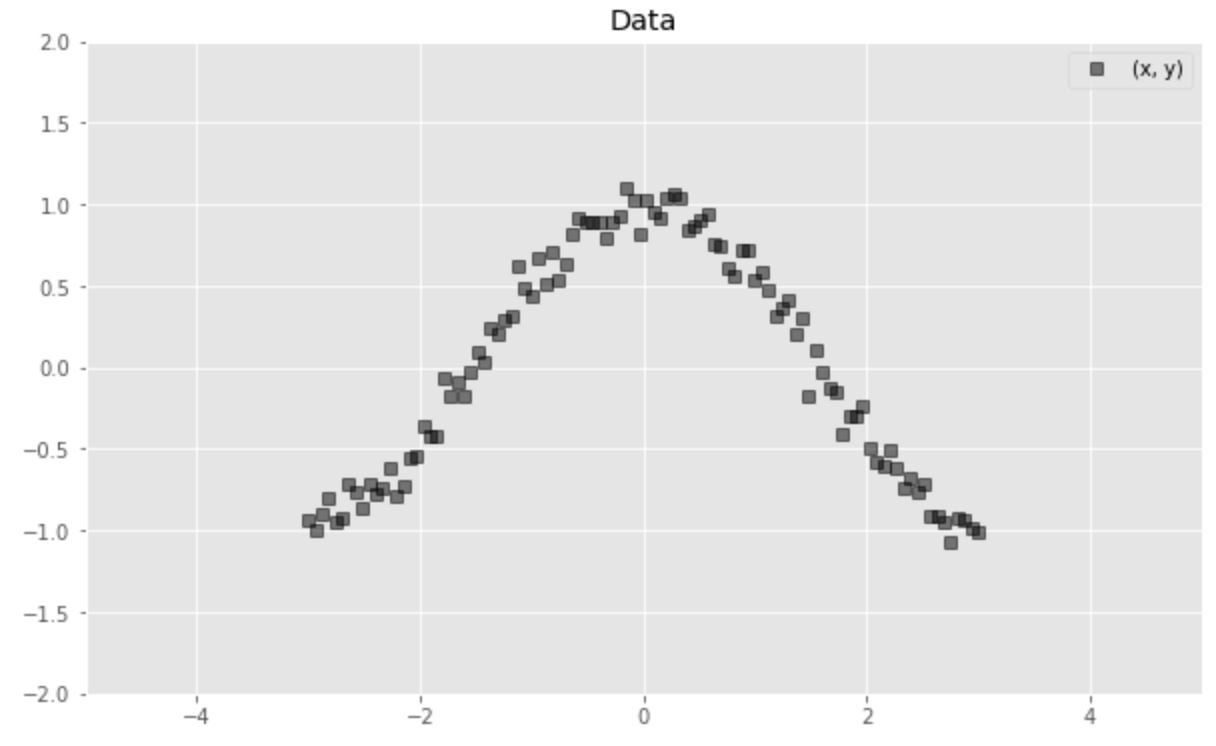
# build a dataset
def build_toy_dataset(N=50, noise_std=0.1):
x = np.linspace(-3, 3, num=N)
y = np.cos(x) + np.random.normal(0, noise_std, size=N)
x = x.astype(np.float32).reshape((N, 1))
y = y.astype(np.float32)
return x, y
def neural_network(x, W_0, W_1, b_0, b_1):
h = torch.tanh(torch.matmul(x, W_0) + b_0)
h = torch.matmul(h, W_1) + b_1
return torch.reshape(h, [-1])
pyro.set_rng_seed(42)
N = 100 # number of data points
D = 1 # number of features
x_train, y_train = build_toy_dataset(N)
x_train_tensor = torch.tensor(x_train, dtype=torch.float)
y_train_tensor = torch.tensor(y_train, dtype=torch.float)
params0 = {
'w0_loc': torch.zeros([D, 2]),
'w0_scale' : torch.ones([D, 2]),
'w1_loc' : torch.zeros([2, 1]),
'w1_scale' : torch.ones([2, 1]),
'b0_loc': torch.zeros(2),
'b0_scale': torch.ones(2),
'b1_loc': torch.tensor(1.),
'b1_scale': torch.tensor(1.)
}
def model(data_x, data_y, params):
w0 = pyro.sample("w0", Normal(loc = params["w0_loc"], scale = params["w0_scale"] ))
w1 = pyro.sample("w1", Normal(loc = params["w1_loc"], scale = params["w1_scale"] ))
b0 = pyro.sample("b0", Normal(loc = params["b0_loc"], scale = params["b0_scale"] ))
b1 = pyro.sample("b1", Normal(loc = params["b1_loc"], scale = params["b1_scale"] ))
for i in range(len(data_x)):
y = pyro.sample("obs_{}".format(i),\
Normal(loc = neural_network(data_x[i], w0, w1, b0, b1), scale = 0.1 * torch.ones(1)),\
obs = data_y[i])
def guide(data_x, data_y, params):
qw0_loc = pyro.param("qw0_loc", params['w0_loc'])
qw0_scale = pyro.param("qw0_scale", params['w0_scale'], constraint=constraints.positive)
qw1_loc = pyro.param("qw1_loc", params['w1_loc'])
qw1_scale = pyro.param("qw1_scale", params['w1_scale'], constraint=constraints.positive)
qb0_loc = pyro.param("qb0_loc", params['b0_loc'])
qb0_scale = pyro.param("qb0_scale", params['b0_scale'], constraint=constraints.positive)
qb1_loc = pyro.param("qb1_loc", params['b1_loc'])
qb1_scale = pyro.param("qb1_scale", params['b1_scale'], constraint=constraints.positive)
softplus = torch.nn.Softplus()
w0 = pyro.sample("w0", Normal(loc = qw0_loc, scale = softplus(qw0_scale)) )
w1 = pyro.sample("w1", Normal(loc = qw1_loc, scale = softplus(qw1_scale)) )
b0 = pyro.sample("b0", Normal(loc = qb0_loc, scale = softplus(qb0_scale)) )
b1 = pyro.sample("b1", Normal(loc = qb1_loc, scale = softplus(qb1_scale)) )
for i in range(len(data_x)):
y = pyro.sample("obs_{}".format(i),\
Normal(loc = neural_network(data_x[i], w0, w1, b0, b1), scale = 0.1 * torch.ones(1))
adam_params = {"lr": 0.0005}
optimizer = Adam(adam_params)
svi = SVI(model, guide, optimizer, loss=Trace_ELBO())
n_steps = 500
losses = []
pyro.set_rng_seed(42)
# SVI
pyro.get_param_store().clear()
for step in range(n_steps):
loss = svi.step(x_train_tensor, y_train_tensor, params0)
losses.append( loss/len(x_train_tensor) )
if step % 100 == 0:
print("[iteration %04d] loss: %.4f" % (step + 1, loss/len(x_train_tensor)))